Tutorial Document
YmsCoreBluetooth Tutorial
YmsCoreBluetooth is a framework for building Bluetooth LE capability to an iOS app. It extends the CoreBluetooth framework by implementing functionality to manage BLE peripherals, their services, and the characteristics of those services.
The communication patterns used by YmsCoreBluetooth are as follows:
Notifications are handled by implementing a handler method.
Read/Write requests are handled using callback functions implemented as ObjectiveC blocks.
This tutorial will describe how to build a Bluetooth LE peripheral driver based on YmsCoreBluetooth.
Building a SensorTag Peripheral
Shown below is a partial file hierarchy of Deanna to help illustrate the organization and construction of TI SensorTag peripheral using the YmsCoreBluetooth framework. There are two directories of interest:
YmsCoreBluetooth/which contains all files for this frameworkDeanna/Services/which contains an implementation of the SensorTag peripheral
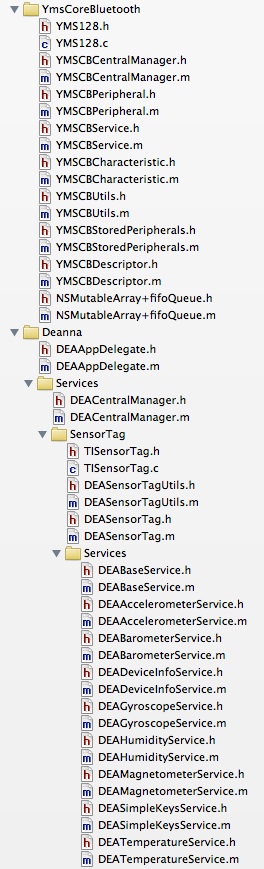
With the above figure, let’s walk through building a SensorTag peripheral.
Subclass YMSCBCentralManager to make DEACentralManager
The class DEACentralManager in Deanna/Services/DEACentralManager.[hm] is an application service to manage all known peripherals as defined by you the implementer. In this case we’re only concerning ourselves with SensorTag peripherals.
It is typically implemented as a singleton instance and contains the following method implementations:
initSharedServiceWithDelegate:sharedServicestartScanhandleFoundPeripheralmanagerPoweredOnHandler
The initSharedServiceWithDelegate: method is a singleton constructor for DEACentralManager. In this implementation, the property [YMSCBCentralManager knownPeripheralNames] is set using [YMSCBCentralManager initWithKnownPeripheralNames:queue:useStoredPeripherals:delegate:] to help identify and filter the peripherals you care to communicate with.
+ (DEACentralManager *)initSharedServiceWithDelegate:(id)delegate {
if (sharedCentralManager == nil) {
dispatch_queue_t queue = dispatch_queue_create("com.yummymelon.deanna", 0);
NSArray *nameList = @[@"TI BLE Sensor Tag", @"SensorTag"];
sharedCentralManager = [[super allocWithZone:NULL] initWithKnownPeripheralNames:nameList
queue:queue
useStoredPeripherals:YES
delegate:delegate];
}
return sharedCentralManager;
}
+ (DEACentralManager *)sharedService {
if (sharedCentralManager == nil) {
NSLog(@"ERROR: must call initSharedServiceWithDelegate: first.");
}
return sharedCentralManager;
}
The startScan method lets you define how to go about scanning for peripherals. Within its implementation should be a call to scanForPeripheralsWithServices:options:withBlock: to tell the CBCentralManager property manager to start scanning.
- (void)startScan {
NSDictionary *options = @{ CBCentralManagerScanOptionAllowDuplicatesKey: @NO };
__weak DEACentralManager *this = self;
[self scanForPeripheralsWithServices:nil
options:options
withBlock:^(CBPeripheral *peripheral, NSDictionary *advertisementData, NSNumber *RSSI, NSError *error) {
if (error) {
NSLog(@"Something bad happened with scanForPeripheralWithServices:options:withBlock:");
return;
}
NSLog(@"DISCOVERED: %@, %@, %@ db", peripheral, peripheral.name, RSSI);
[this handleFoundPeripheral:peripheral];
}];
}
Note that a weak pointer named this is set to self. This is done to handle retain issues with referencing self within an ObjectiveC block.
The callback block is executed upon a response from a BLE peripheral that is advertising. A discovered BLE peripheral will pass a pointer to itself (peripheral), advertisement data (advertisementData), its RSSI value (RSSI), and in the event of a failure, an error object (error) to the callback block. In this implementation, the execution of the callback block will call handleFoundPeripheral:. Note that the statements in handleFoundPeripheral: could just as easily be located within the block statement.
The handleFoundPeripheral: method defines what to do once you’ve found a peripheral via scanning. In the case of a SensorTag it is to instantiate DEASensorTag, a subclass of YMSCBPeripheral.
- (void)handleFoundPeripheral:(CBPeripheral *)peripheral {
YMSCBPeripheral *yp = [self findPeripheral:peripheral];
if (yp == nil) {
BOOL isUnknownPeripheral = YES;
for (NSString *pname in self.knownPeripheralNames) {
if ([pname isEqualToString:peripheral.name]) {
DEASensorTag *sensorTag = [[DEASensorTag alloc] initWithPeripheral:peripheral
central:self
baseHi:kSensorTag_BASE_ADDRESS_HI
baseLo:kSensorTag_BASE_ADDRESS_LO];
[self.ymsPeripherals addObject:sensorTag];
isUnknownPeripheral = NO;
break;
}
}
if (isUnknownPeripheral) {
//TODO: Handle unknown peripheral
yp = [[YMSCBPeripheral alloc] initWithPeripheral:peripheral central:self baseHi:0 baseLo:0];
[self.ymsPeripherals addObject:yp];
}
}
}
An alternate implementation of startScan without using a block callback is to use scanForPeripheralsWithServices:options:. In this case, you then must implement handleFoundPeripheral: to handle the discovered peripheral.
A common task is to define program behavior upon a change in the state of CBCentralManager. This is accomplished by implementing the methods which are named after their respective states:
managerPoweredOnHandlermanagerUnknownHandlermanagerPoweredOffHandlermanagerResettingHandlermanagerUnauthorizedHandlermanagerUnsupportedHandler
For our purpose, we are interested on retrivieving previously discovered peripherals whose UUIDs have been persisted from a previous run of the app upon CBCentralManager being powered on:
- (void)managerPoweredOnHandler {
if (self.useStoredPeripherals) {
NSArray *identifiers = [YMSCBStoredPeripherals genIdentifiers];
[self retrievePeripheralsWithIdentifiers:identifiers];
}
}
Subclass YMSCBPeripheral to make DEASensorTag
The class implementation of DEASensorTag in Deanna/Services/SensorTag/DEASensorTag.[hm] is where the top-level behavior of the SensorTag peripheral is captured. Two methods are implemented:
initWithPeripheral:central:baseHi:baseLo:- the constructor for DEASensorTagconnect- the method to initiate a connection request for the peripheral.
The class constructor for DEASensorTag is responsible for instantiating subclasses of YMSCBService to capture the behavior of the different BLE services offered by the SensorTag. The source for this constructor, initWithPeripheral:central:baseHi:baseLo: is shown below:
- (instancetype)initWithPeripheral:(CBPeripheral *)peripheral
central:(YMSCBCentralManager *)owner
baseHi:(int64_t)hi
baseLo:(int64_t)lo {
self = [super initWithPeripheral:peripheral central:owner baseHi:hi baseLo:lo];
if (self) {
DEATemperatureService *ts = [[DEATemperatureService alloc] initWithName:@"temperature" parent:self baseHi:hi baseLo:lo serviceOffset:kSensorTag_TEMPERATURE_SERVICE];
DEAAccelerometerService *as = [[DEAAccelerometerService alloc] initWithName:@"accelerometer" parent:self baseHi:hi baseLo:lo serviceOffset:kSensorTag_ACCELEROMETER_SERVICE];
DEASimpleKeysService *sks = [[DEASimpleKeysService alloc] initWithName:@"simplekeys" parent:self baseHi:0 baseLo:0 serviceOffset:kSensorTag_SIMPLEKEYS_SERVICE];
DEAHumidityService *hs = [[DEAHumidityService alloc] initWithName:@"humidity" parent:self baseHi:hi baseLo:lo serviceOffset:kSensorTag_HUMIDITY_SERVICE];
DEABarometerService *bs = [[DEABarometerService alloc] initWithName:@"barometer" parent:self baseHi:hi baseLo:lo serviceOffset:kSensorTag_BAROMETER_SERVICE];
DEAGyroscopeService *gs = [[DEAGyroscopeService alloc] initWithName:@"gyroscope" parent:self baseHi:hi baseLo:lo serviceOffset:kSensorTag_GYROSCOPE_SERVICE];
DEAMagnetometerService *ms = [[DEAMagnetometerService alloc] initWithName:@"magnetometer" parent:self baseHi:hi baseLo:lo serviceOffset:kSensorTag_MAGNETOMETER_SERVICE];
DEADeviceInfoService *ds = [[DEADeviceInfoService alloc] initWithName:@"devinfo" parent:self baseHi:0 baseLo:0 serviceOffset:kSensorTag_DEVINFO_SERV_UUID];
self.serviceDict = @{@"temperature": ts,
@"accelerometer": as,
@"simplekeys": sks,
@"humidity": hs,
@"magnetometer": ms,
@"gyroscope": gs,
@"barometer": bs,
@"devinfo": ds};
}
return self;
}
In this implementation, the following BLE services of the SensorTag are supported:
- Temperature Service - DEATemperatureService
- Accelerometer Service - DEAAccelerometerService
- Simple Keys Service - DEASimpleKeysService
- Humidity Service - DEAHumidityService
- Barometer Service - DEABarometerService
- Gyroscope Service - DEAGyroscopeService
- Magnetometer Service - DEAMagnetometerService
- Device Information Service - DEADeviceInfoService
The instances of these classes are stored in the dictionary [YMSCBPeripheral serviceDict] where their respective keys are human-readable strings.
The connect method implements all the desired behavior involved with connecting to a BLE peripheral. It is here where the utility of ObjectiveC blocks to handle response behavior becomes evident.
In the following implementation the following tasks are undertaken in sequential order:
- peripheral connection (
connectionWithOptions:withBlock:) - discover services for that peripheral (
discoverServices:withBlock:) - discover charcteristics for each service (
discoverChararcteristics:withBlock:) - discover descriptors for each characteristic (
discoverDescriptors:withBlock:)
Note that the tasks listed above are accomplished via a nested chain of callbacks.
- (void)connect {
// Watchdog aware method
[self resetWatchdog];
[self connectWithOptions:nil withBlock:^(YMSCBPeripheral *yp, NSError *error) {
if (error) {
return;
}
[yp discoverServices:[yp services] withBlock:^(NSArray *yservices, NSError *error) {
if (error) {
return;
}
for (YMSCBService *service in yservices) {
if ([service.name isEqualToString:@"simplekeys"]) {
__weak DEASimpleKeysService *thisService = (DEASimpleKeysService *)service;
[service discoverCharacteristics:[service characteristics] withBlock:^(NSDictionary *chDict, NSError *error) {
[thisService turnOn];
}];
} else if ([service.name isEqualToString:@"devinfo"]) {
__weak DEADeviceInfoService *thisService = (DEADeviceInfoService *)service;
[service discoverCharacteristics:[service characteristics] withBlock:^(NSDictionary *chDict, NSError *error) {
[thisService readDeviceInfo];
}];
} else {
__weak DEABaseService *thisService = (DEABaseService *)service;
[service discoverCharacteristics:[service characteristics] withBlock:^(NSDictionary *chDict, NSError *error) {
for (NSString *key in chDict) {
YMSCBCharacteristic *ct = chDict[key];
//NSLog(@"%@ %@ %@", ct, ct.cbCharacteristic, ct.uuid);
[ct discoverDescriptorsWithBlock:^(NSArray *ydescriptors, NSError *error) {
if (error) {
return;
}
for (YMSCBDescriptor *yd in ydescriptors) {
NSLog(@"Descriptor: %@ %@ %@", thisService.name, yd.UUID, yd.cbDescriptor);
}
}];
}
}];
}
}
}];
}];
}
Define BLE services of this peripheral.
The BLE services of a peripheral are described by using subclasses of YMSCBService. For the SensorTag, all but the device information service (DEADeviceInfoService) are subclassed from DEABaseService which has support for common configuration and turn on/off behavior.
This subclass is responsible for implementing:
- Properties that are specific to the bluetooth service.
- The class constructor [YMSCBService initWithName:parent:baseHi:baseLo:], defining the BLE characteristics with subclasses of YMSCBCharacteristic via [YMSCBService addCharacteristic:withOffset:].
notifyCharacteristicHandlerto handle responses for characteristics whose notifications have been turned on.- Any processing logic germane to the BLE service (e.g. temperature conversion, data correction/smoothing, etc.).
- Specific read/write transaction sequences germane to the BLE service.
Shown below is the implementation for DEAAccelerometerService.
#import "DEAAccelerometerService.h"
#import "YMSCBCharacteristic.h"
float calcAccel(int16_t rawV) {
float v;
v = ((float)rawV + 1.0) / (256.0/4.0);
return v;
}
@implementation DEAAccelerometerService
- (instancetype)initWithName:(NSString *)oName
parent:(YMSCBPeripheral *)pObj
baseHi:(int64_t)hi
baseLo:(int64_t)lo
serviceOffset:(int)serviceOffset {
self = [super initWithName:oName
parent:pObj
baseHi:hi
baseLo:lo
serviceOffset:serviceOffset];
if (self) {
[self addCharacteristic:@"data" withOffset:kSensorTag_ACCELEROMETER_DATA];
[self addCharacteristic:@"config" withOffset:kSensorTag_ACCELEROMETER_CONFIG];
[self addCharacteristic:@"period" withOffset:kSensorTag_ACCELEROMETER_PERIOD];
}
return self;
}
- (void)notifyCharacteristicHandler:(YMSCBCharacteristic *)yc error:(NSError *)error {
if (error) {
return;
}
if ([yc.name isEqualToString:@"data"]) {
NSData *data = yc.cbCharacteristic.value;
char val[data.length];
[data getBytes:&val length:data.length];
int16_t xx = val[0];
int16_t yy = val[1];
int16_t zz = val[2];
__weak DEAAccelerometerService *this = self;
_YMS_PERFORM_ON_MAIN_THREAD(^{
this.x = [NSNumber numberWithFloat:calcAccel(xx)];
this.y = [NSNumber numberWithFloat:calcAccel(yy)];
this.z = [NSNumber numberWithFloat:calcAccel(zz)];
});
}
}
- (void)configPeriod:(uint8_t)value {
YMSCBCharacteristic *periodCt = self.characteristicDict[@"period"];
__weak DEAAccelerometerService *this = self;
[periodCt writeByte:value withBlock:^(NSError *error) {
//NSLog(@"Set period to: %x", value);
this.period = @(value);
}];
}
- (void)readPeriod {
YMSCBCharacteristic *periodCt = self.characteristicDict[@"period"];
__weak DEAAccelerometerService *this = self;
[periodCt readValueWithBlock:^(NSData *data, NSError *error) {
char val[data.length];
[data getBytes:&val length:data.length];
int16_t periodValue = val[0];
_YMS_PERFORM_ON_MAIN_THREAD(^{
this.period = @(periodValue);
});
}];
}
@end
The class constructor initWithName:parent:baseHi:baseLo:serviceOffset: defines three BLE characteristics using [YMSCBService addCharacteristic:withOffset:] which we can reference with the following four strings: (“data”, “config”, “period”).
When the service is turned on using the method [DEABaseService turnOn], notifications for the “data” characteristic are turned on. Handling notification events sent from the SensorTag are handled by notifyCharacteristicHandler. The acceleration measurements are stored as NSNumber properties x, y, z. These properties can then be Key-Value Observed (KVO) by the application, typically to be displayed in user interface.
Important: To let the UI components in the main thread know via KVO that a property has changed, you must update that property on the main thread. A convenience macro _YMS_PERFORM_ON_MAIN_THREAD which uses the GCD call dispatch_async() does just that:
#define _YMS_PERFORM_ON_MAIN_THREAD(block) dispatch_async(dispatch_get_main_queue(), block);
Comments
This document can always be improved. Please submit any comments or corrections about this document to the issue tracker for YmsCoreBluetooth.
Thank you for using YmsCoreBluetooth!